
The Challenge
A Student Team Building an Autonomous Race Car From Scratch
PWR Racing Team has been building Formula Student cars at Wrocław University of Science and Technology since 2009. Sixteen cars later, the team is the oldest and most decorated Formula Student program in Poland: Formula SAE Italy 2017 winners, Formula Student Easter 2025 overall winners, four electric vehicles with autonomous driving systems, around 90 students working across mechanical, composites, vehicle performance, software, electrical, marketing, and business departments every year.
The 2026 car is the RT16e: their fifth electric vehicle and the next iteration of the Driverless platform that started with the RT12e in 2022. The 2025 RT15e went 0-100 km/h in 3.4 seconds at 180 kg with 106 hp. The RT16e takes that platform and pushes it harder into the autonomous side of Formula Student, where points are scored without a driver in the seat.
In Formula Student Driverless, the autonomous events are scored at:
- DV Acceleration: 75 points
- DV Skidpad: 75 points (figure-eight on two 18.25 m diameter circles)
- DV Autocross: 100 points (single autonomous lap on a cone-defined track)
- DV Trackdrive: 200 points (multi-lap)
To finish any of those events, the car has to do three things on its own: see the track (cone detection), know where it is (localization), and stop itself cleanly inside the finish box. Get any of those wrong and the run is invalid, no points awarded.
Localization Is the Quiet Bottleneck
The team's autonomous stack is built around the Autonomous System Master Unit (ASMU), which fuses sensor data, runs path planning, and commands torque and steering angle to the car. The ASMU's outputs are only as good as the position estimate it gets.
"Main challenge we are trying to solve with RTK corrections is the precision of our Motion Estimation algorithm. Output from this algorithm is later used for example to help determine our car location on track or in Control Systems calculations."Aleksander Dziągwa, Embedded Developer (RT16e), PWR Racing Team
That stack is exactly the place where standard GNSS falls apart. A consumer-grade single-antenna GNSS receiver gives 2-5 m of horizontal error. On a Skidpad track measured in meters, that error is the entire course. Path planning algorithms need positioning that is at least an order of magnitude tighter than the cone spacing they reason over.
Control systems need stable yaw estimates. When the ASMU commands torque and steering angle to track a planned path, it depends on a clean position and heading signal. Drifting GNSS pollutes that signal directly into the control loop.
Permanent RTK infrastructure ties capital to a single venue. A dedicated base station costs $5,000 to $15,000 and has to be set up, surveyed in, and protected at every test ground or competition. Country-specific GNSS networks add per-receiver licensing on top. Other Formula Student Driverless programs typically partner directly with high-end INS suppliers for this. PWR Racing chose a different architecture: a portable, network-RTK setup the team can ship from their workshop in Wrocław to any FS event in Europe without renegotiating coverage or carrying a base station in the trailer.
The Solution
On-Board NTRIP Client to RTK Receiver
The data flow on the RT16e:
- An on-board Raspberry Pi Zero paired with a Quectel SIM7080G LTE/GSM module pulls RTK corrections from RTKdata via NTRIP over cellular.
- A Python script on the Pi forwards the RTCM 3.2 correction stream over RS232 to the Xsens MTi-680G, the integrated RTK GNSS/INS at the heart of motion estimation.
- Xsens MTi-680G combines its u-blox ZED-F9P RTK receiver with internal IMU fusion and outputs position, velocity, and orientation onto the CAN bus.
- ASMU picks up the fused state from CAN and feeds it into Motion Estimation, Path Planner, and Control Systems.
This keeps the entire correction pipeline on the car. No pit-side infrastructure, no umbilical to the team paddock, nothing that has to be torn down between sessions. The team ships the RT16e to a Formula Student venue and the on-board NTRIP client connects to RTKdata over cellular the moment the car is powered up.

Why Xsens MTi-680G
The MTi-680G is a sensible match for an autonomous Formula Student car:
- Internal RTK-enabled u-blox ZED-F9P receiver, multi-band, multi-constellation (GPS, GLONASS, Galileo, BeiDou)
- 1 cm + 1 ppm CEP positional accuracy with active RTK fix
- 0.05 m/s RMS velocity accuracy
- 0.5 deg RMS yaw, 0.2 deg RMS roll and pitch from internal sensor fusion
- RTCM 3.2/3.3 correction input over RS232, exactly what the on-board NTRIP client delivers
- IP68, 56.5 × 40.9 × 36.75 mm, 98 g, less than 1 W power draw. Built for vehicles, not lab benches.
This is the same sensor class that other Formula Student Driverless teams use as their navigation backbone. The difference is what feeds it: PWR Racing's $40/month NTRIP subscription scales with the season and pauses between competitions, instead of locking capital into a four-figure base station and venue-specific licensing the team would have to redeploy at every test ground.
NTRIP as the Right Protocol Choice
"Thanks to using this widely supported protocol integration of RTKdata corrections into projects in quite straightforward."Aleksander Dziągwa
NTRIP / RTCM 3.2 is industry-standard. The same correction stream works whether you point it at a u-blox ZED-F9P, an Emlid RX2, a Septentrio mosaic, a DJI Matrice, or in this case an Xsens MTi-680G. There is no proprietary client to license, no hardware lock-in, and no vendor-specific firmware path. For a student team that has to integrate with whatever sensor the next generation can afford, that protocol portability is not a small thing. It is what lets the integration outlive the current car.
The Results
The "Olek on the GPS Plot" Validation
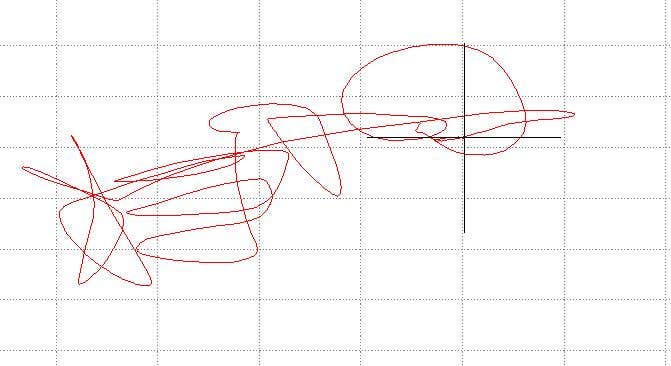
The most direct proof came from a basic test with the full correction chain running into the Xsens. Aleksander stood in one place and walked the Xsens GNSS antenna around in the air, tracing letters.
The GPS plot read back: OLEK.
His own name, drawn by walking the antenna a few centimeters at a time. That only works if the position estimate is genuinely centimeter-accurate.
"While testing I was able to draw my name (Olek) on GPS location graph just by standing in place and moving Xsens antenna around. Without RTK correction GPS precision was too low to do something like that."Aleksander Dziągwa
That story matters more than a spec-sheet number, because it makes the precision tangible. A 2-meter error sensor cannot trace four letters. A 1-2 cm sensor can. The same precision that draws "OLEK" on the workshop floor is the precision the ASMU uses to know where the car is on a Skidpad eight.
What Becomes Possible at Competition
For the 2026 season the RT16e is targeting at minimum:
- DV Acceleration (75 m straight-line, autonomous start, autonomous stop)
- DV Skidpad (figure-eight on two 18.25 m diameter circles, multiple laps)
- DV Autocross (single autonomous lap on a cone-defined track)
Every one of those events ends only when the car detects the finish, brakes itself to a stop, and stays stopped inside a defined box.

"Precise GPS localization will help us correctly estimate car location on track, which is important for Path Planner and other algorithms."Aleksander Dziągwa
Stop in the wrong box: invalid run. Drift off the cone-defined corridor on Skidpad: invalid run. With a centimeter-accurate position fused into the Motion Estimation stack, both of those failure modes shrink. The ASMU has a position estimate it can actually plan against.
A Workflow Note for Race Day
The Float-to-Fix convergence on RTK takes a couple of minutes when the receiver has been off. In the workshop the team rarely sees this because the low-voltage system stays powered up between sessions. At competition, the car is currently switched on shortly before each run.
"We can change our approach to warm-up procedure before starts to accommodate this Float→Fix conversion."Aleksander Dziągwa
This is the kind of small process adjustment that turns a working integration into a competition-ready one. Power up the LV system early, let the Xsens reach RTK fix in the holding area, then grid up. Free precision, just by sequencing the start procedure.
A Scalable Recommendation for Student and Hobby Robotics
PWR Racing's RT16e is an autonomous robotics platform in motorsport clothing - the sensor fusion, state estimation, and RTK integration challenges are identical to those in commercial AGVs.
Aleksander's clearest endorsement is operational, not promotional:
"I would recommend RTKdata to student or hobby projects, as they provide wide, global coverage, high precision corrections over NTRIP protocol. Thanks to using this widely supported protocol integration of RTKdata corrections into projects in quite straightforward."Aleksander Dziągwa, Embedded Developer (RT16e), PWR Racing Team
For the dozens of Formula Student and university robotics teams running into the same set of constraints (centimeter precision required, mobility across multiple test grounds and competition venues, no permanent infrastructure to anchor the team to one location), this is proof the architecture works. An on-board NTRIP client over cellular, RS232 to the RTK receiver, fused state to the autonomous stack.
Technical Setup
The RTK + IMU fusion architecture in the RT16e maps directly to the principles in our guide on sensor fusion for autonomous vehicle localization.
| Component | Detail |
|---|---|
| Correction Service | RTKdata NTRIP RTK (cloud-based) |
| Protocol | NTRIP / RTCM 3.2 |
| Constellations | GPS, GLONASS, Galileo, BeiDou |
| On-Board NTRIP Client | Raspberry Pi Zero + Quectel SIM7080G LTE/GSM module, custom Python script forwarding RTCM 3.2 over RS232 |
| On-Board RTK GNSS/INS | Xsens MTi-680G (u-blox ZED-F9P, IMU fusion, IP68) |
| Sensor-to-ASMU Bus | RS232 (NTRIP client → Xsens), CAN bus (Xsens → ASMU) |
| Achieved Position Accuracy | 1 cm + 1 ppm CEP with RTK fix |
| Achieved Orientation Accuracy | 0.5 deg RMS yaw, 0.2 deg RMS roll/pitch |
| Use Cases | Motion Estimation, Path Planning, Control Systems, Telemetry |
| Base Station Required | None |
| Vehicle Platform | RT16e Formula Student Driverless (DV class, electric) |
What's Next
The RT16e season starts with the team adapting their power-up procedure to give the Xsens MTi-680G enough time to converge to RTK fix before each autonomous run, and continues through the 2026 Formula Student calendar with the goal of completing DV Acceleration, DV Skidpad, and DV Autocross runs cleanly. Beyond points scored, the integration itself becomes part of the team's institutional knowledge: the next car generations inherit a working RTK stack, and the next embedded developers inherit a Python NTRIP client and a working RS232-to-Xsens pipeline they can iterate on instead of rebuild.
Longer-term, the precision opens up tighter control loops on control systems, better post-run telemetry analysis (lap reconstruction at centimeter accuracy is a different category of debug data than 5-meter GPS traces), and the foundation for whatever the RT17e wants to do.
Formula Student Driverless is a direct proving ground for autonomous vehicle positioning - the centimeter-accurate RTK used to navigate a cone track is the same architecture used in production AV platforms.
Frequently Asked Questions
Why does a Formula Student Driverless car need RTK GPS instead of standard GNSS?
Formula Student Driverless events (DV Skidpad, DV Acceleration, DV Autocross, DV Trackdrive) are scored on a cone-defined track measured in meters. Standard single-antenna GNSS gives 2-5 m of horizontal error, which is wider than the entire course on Skidpad. RTK corrections via NTRIP bring horizontal accuracy down to 1-2 cm, which is what Motion Estimation, Path Planner, and Control Systems algorithms need to actually plan and execute autonomous laps.
What positional accuracy does the Xsens MTi-680G achieve with RTKdata NTRIP corrections?
With RTKdata NTRIP corrections, the Xsens MTi-680G reaches its specified RTK accuracy of 1 cm + 1 ppm CEP horizontally, with 0.5 deg RMS yaw and 0.2 deg RMS roll/pitch from internal sensor fusion. PWR Racing Team validated this in practice by walking the GNSS antenna in small patterns on a workshop floor and tracing recognizable letters on the GPS plot, which is only possible at centimeter-level precision.
Is RTKdata affordable for student Formula Student or robotics teams?
Yes. RTKdata's Standard subscription is approximately $40 per month and works with any RTCM 3.2 capable receiver, with no per-vehicle licensing or hardware base station required. RTKdata actively partners with student teams and hobby robotics projects because the NTRIP protocol portability and pricing model fit how those projects actually run.
Why use NTRIP instead of a physical RTK base station for a Formula Student team?
A physical RTK base station costs roughly $5,000 to $15,000 and has to be set up, surveyed in, and protected at every test site or competition. RTKdata's NTRIP service streams network RTK corrections from over 20,000 reference stations in 140+ countries, so the team gets the same 1-2 cm accuracy at any test ground or competition venue without buying or transporting hardware. For a team that travels between multiple test grounds and competition venues each season, this matches how the team actually operates.