Network RTK Comparison: Which System Performs Best?
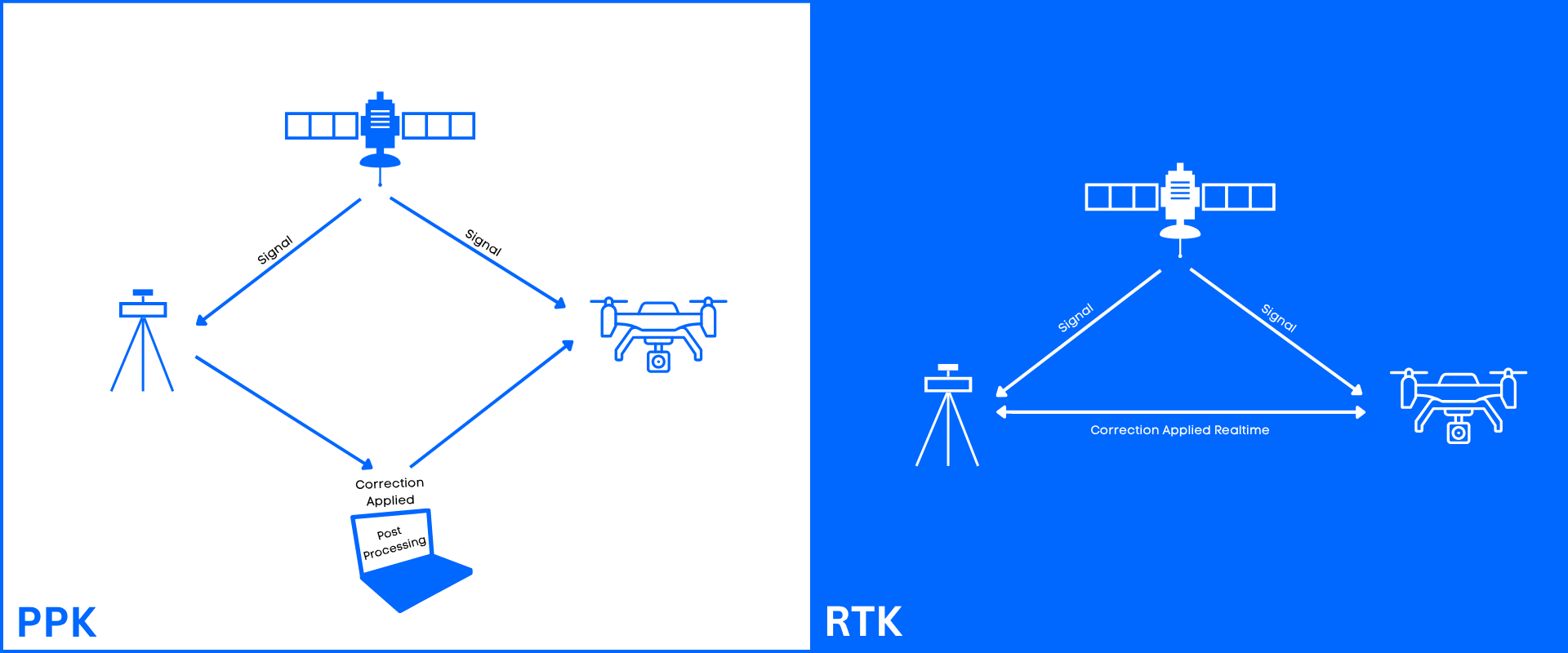
Network RTK combines multiple reference stations to model distance‑dependent GNSS errors and stream real-time corrections across large regions. It contrasts network vs single‑base setups and shows how station density, uptime, and update rates.